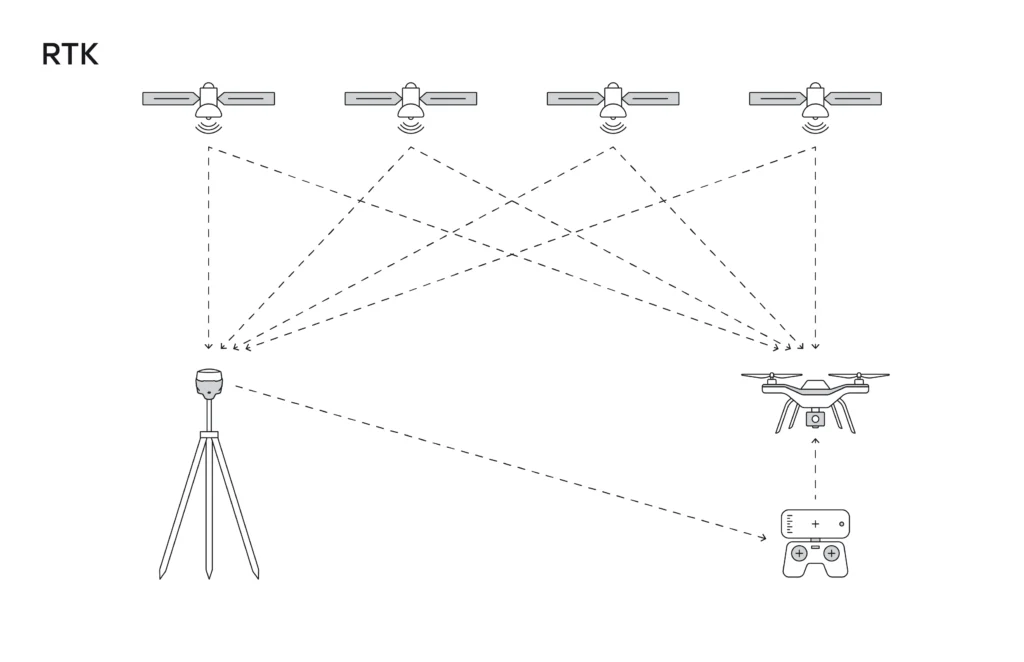
| Precisión en tiempo real | Ideal para proyectos que requieren resultados inmediatos, ya que las correcciones se aplican durante el vuelo. | No apto para resultados inmediatos, ya que las correcciones se aplican después del vuelo. |
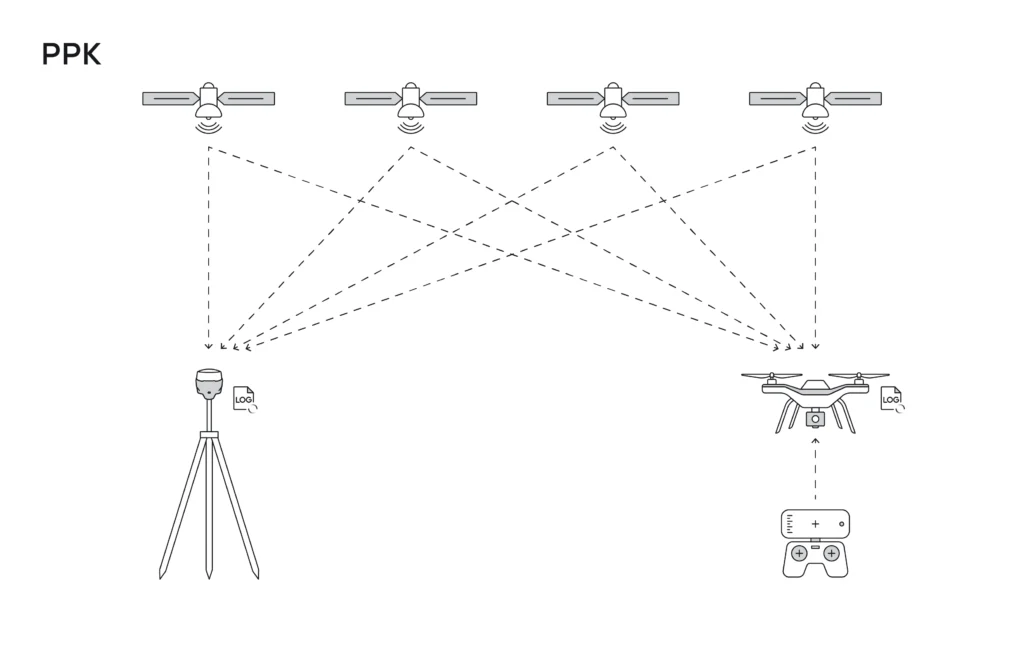
| Conectividad | Requiere telemetría estable entre el control del dron (que recibe correcciones de la base) y el dron. | No necesita correcciones en tiempo real desde la base; las correcciones se aplican con datos registrados. |
| Terreno y obstáculos | Mejor en áreas abiertas con mínimas obstrucciones para mantener una señal fuerte. | Se adapta mejor a terrenos complejos u obstruidos, ya que no depende de telemetría. |
| Tamaño del área de proyecto | Adecuado para áreas pequeñas o medianas dentro del rango cercano a la estación base. | Más conveniente para proyectos de gran escala, ya que la distancia a la estación base no es tan limitante. |
| Ubicaciones remotas | Menos efectivo en zonas sin red confiable o sin acceso a estaciones base. | Ideal para áreas remotas, ya que no requiere señal de corrección en vivo. |
| Post-procesamiento | Requiere mínimo post-procesamiento, lo que agiliza el flujo de trabajo. | Necesita procesamiento posterior al vuelo, lo que añade un paso extra. |
| Costo del equipo | Generalmente necesita un dron con RTK integrado y conexión a una fuente de correcciones, aumentando el costo inicial. | Requiere un receptor GNSS para registrar datos, pero no depende de redes de corrección. |
| Velocidad del flujo de trabajo | Flujo de trabajo más rápido, ideal para proyectos con tiempos ajustados. | Flujo de trabajo más lento debido a la configuración más compleja y al post-procesamiento. |
| Confiabilidad | Puede sufrir pérdidas de señal o menor precisión si se interrumpe la conexión con la base. | Más confiable para mantener la precisión, ya que las correcciones se calculan de forma offline. |
| Casos de uso | Monitoreo de construcción, levantamientos pequeños a medianos, proyectos urgentes o áreas con buena conectividad. | Levantamientos a gran escala, ubicaciones remotas, terrenos complejos o proyectos críticos. |